Bump/Direction Sensing

Our bump and direct sensing was accomplished with two roller lever snap switches (Jameco #2097678). One was placed behind the front bumper, and the other was placed along the ground in such a way that the roller would open or close the switch depending on whether or not the robot was going forward or backward. The output of the switch (which was connected to 5V and ground through a load resistor), was processed in a debouncing circuit (shown below) and output to the Arduino.
Having bump and direction information allowed our robot to identify when it was in contact with the opposing robot and, if so, whether or not it was successfully pushing the opponent forward or being pushed backward. In the latter case, we were able to invoke an evasion protocol to move our robot to safety.
Having bump and direction information allowed our robot to identify when it was in contact with the opposing robot and, if so, whether or not it was successfully pushing the opponent forward or being pushed backward. In the latter case, we were able to invoke an evasion protocol to move our robot to safety.
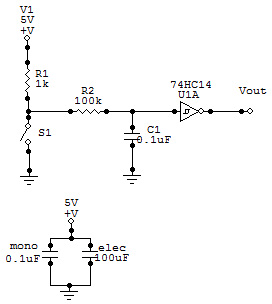
The debouncing circuit used in this application. A signal from the switch is passed through a low pass filter and then inverted by a Schmitt trigger with hysteresis.
