Drivetrain
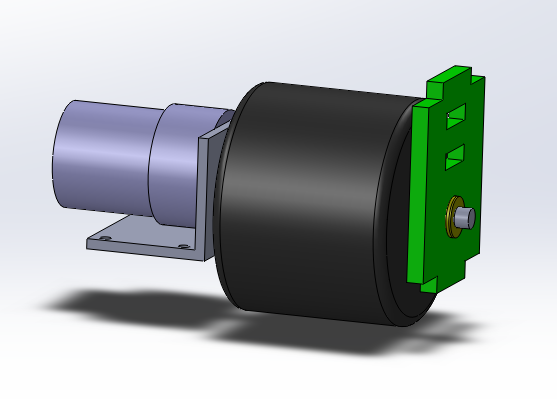
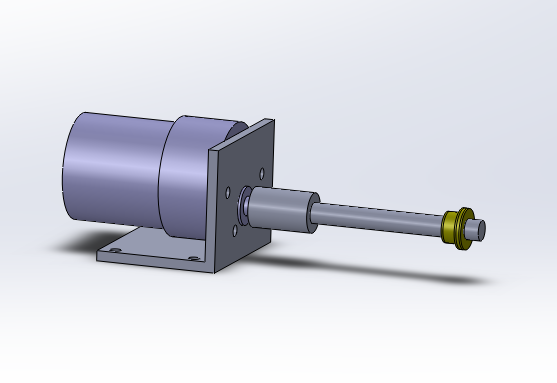
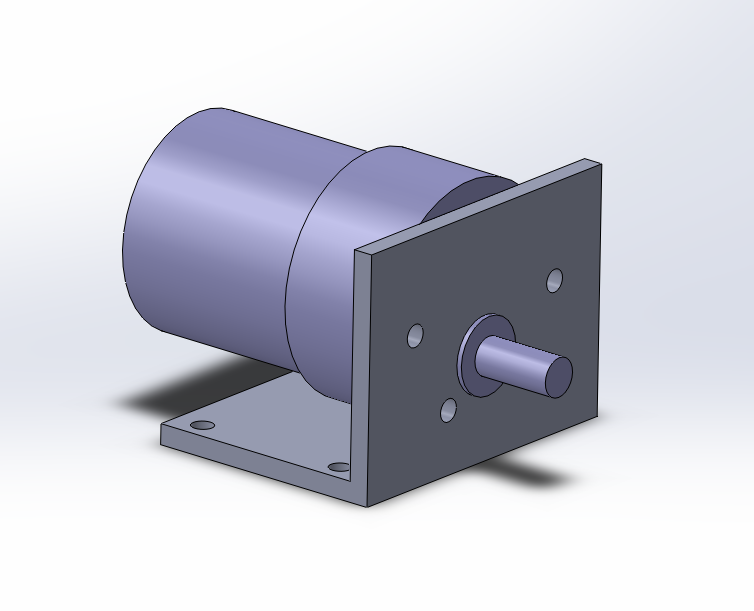
Pork Barrel's drivetrain is a simple, rigid, and reliable design. The motors are mounted to the bottom level of the chassis with a custom made aluminum bracket. A precision ground stainless steel driveshaft with a D-profile is attached to the motor shaft with a shaft coupler. Inside the wheel is an acrylic insert with a matching D-profile which rigidly connects the wheel to the driveshaft. On the other side of the wheel, there is a brass bushing in a support structure that attaches to the chassis. We used two of these assemblies, one for each wheel on our robot. The wheels are rubber longboard wheels, chosen for their width and high coefficient of friction. These allowed for increased traction over standard rollerblade wheels. The final component not pictured above is a caster centered on the back of the robot. We used a single 3/8" ball caster purchased from Sparkfun (https://www.sparkfun.com/products/8909) to provide additional low-friction contact with the ground.
Motors
Our team chose 38GM series motors from Jameco after running calculations to determine what torques our motors would need to output in order to move itself (15 lb) and an opponent (15 lb) with lots of torque to spare. Specifically, the motor we chose (the 38-007, Jameco part #253500) outputs a max efficiency torque of 4800 gcm and a max efficiency speed of 40 rpm at 12 V. The stall current was calculated to be about 95 mA.
We made the decision to over-drive the motor on the voltage of two batteries connected in series (~14.4 V) to gain extra torque output.
We made the decision to over-drive the motor on the voltage of two batteries connected in series (~14.4 V) to gain extra torque output.
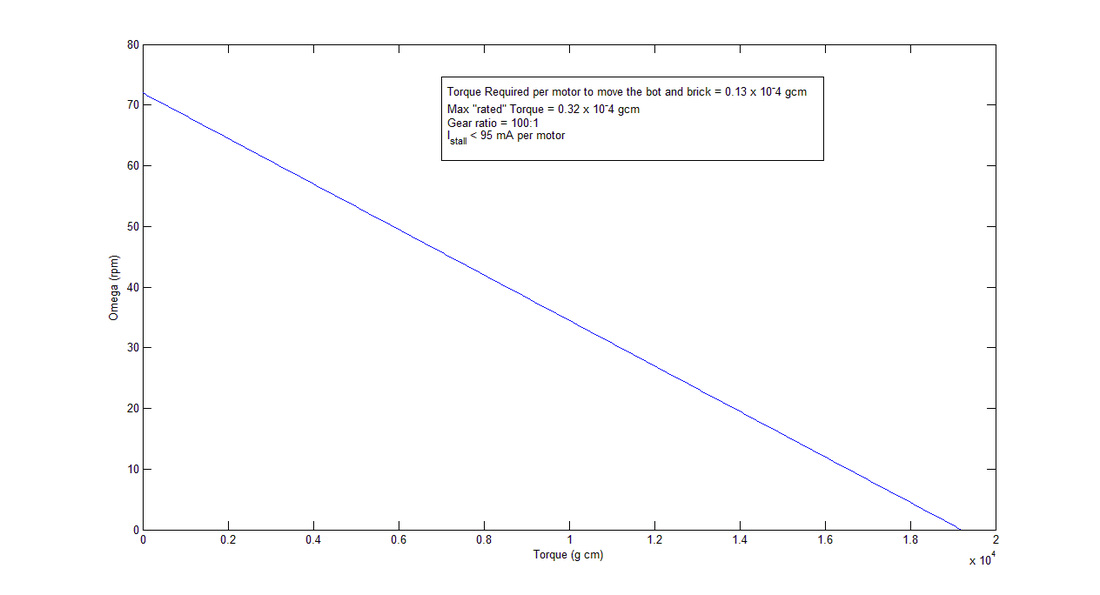
Motor characteristics, as determined from the information provided in the data sheet
